Scan registration and alignment form a critical bridge between data capture and BIM modeling within reality capture projects. Every workflow follows a structured pipeline process. Registration operates in the Process phase. It converts fragmented scan datasets into a unified spatial framework. Laser scapoint cloud to bim service planning generates millions of spatial points from multiple viewpoints.
Each scan carries its own coordinate system. This creates fragmentation across datasets. Registration unifies these datasets into a single coordinate system. It transforms isolated scans into a coherent, usable digital representation that supports modeling, analysis, and documentation.
Registration directly influences BIM accuracy as alignment quality determines how effectively models represent real world conditions. Even small deviations propagate into modeling inaccuracies, clash detection conflicts, and documentation inconsistencies. This stage also performs data validation by confirming consistency, completeness and usability for downstream workflows. Renovation FM projects depend on this level of accuracy to represent existing conditions with clarity.
Modern AEC workflows apply automated and semi automated algorithms for processing large datasets, and expert validation refines outputs for high accuracy deliverables. This stage acts as a risk control mechanism that protects projects from rework, budget escalation, and coordination challenges.
What Is Point Cloud Registration?
Point cloud registration defines a mathematical and computational process. It aligns multiple point clouds into a unified coordinate system. Transformations include translation, rotation, and scaling. Each scan captures a partial view of reality, and registration stitches. These individual datasets into a complete spatial representation.
The process identifies correspondences between datasets through physical targets, geometric features, or algorithmic matching techniques. Spatial transformation matrices map one point cloud onto another. This enables accurate positioning across all scans. It forms the foundation for point cloud to BIM services, CAD drafting, and digital twin creation.
- Registration applies translation, rotation, and scaling to align datasets
- Each scan contributes a partial spatial view that combines into a full model
- Correspondence detection uses targets, features, or algorithmic matching
- Transformation matrices define mathematical relationships between scans
- Registration supports BIM, CAD, and digital twin workflows
- Iterative Closest Point refines alignment through distance minimization
- Temporal comparison enables progress tracking and deformation analysis
The Iterative Closest Point (ICP) algorithm plays a central role in fine registration. It iteratively minimizes distances between corresponding points across datasets. This method improves alignment through continuous optimization and enhances spatial accuracy across complex environments. Laser scan registration process also supports temporal analysis, allowing professionals to compare datasets over time for progress tracking and deformation studies.
The quality of registration directly influences downstream processes such as clash detection, quantity takeoffs, and facility management. This process combines geometric alignment with data association, linking real-world elements to BIM components and enabling accurate digital representation.

What Is Scan Alignment in BIM Workflows?
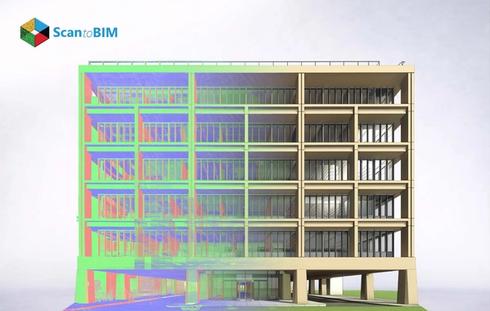
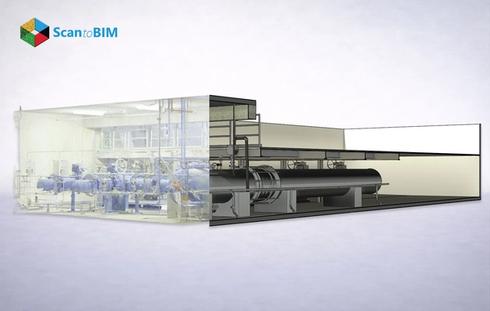
Scan alignment in BIM workflows represents a controlled transformation of registered 3D point cloud data. It positions this data within the project coordinate framework of BIM environments. These include Autodesk Revit, Autodesk ReCap, and Autodesk Navisworks. This process positions point clouds relative to shared coordinates, project base point, and survey point. It creates a spatial relationship between captured reality and design intent. Alignment operates across two dimensions: internal consistency (scan-to-scan) and external consistency (scan-to-BIM).
Internal alignment maintains geometric continuity within the dataset. External alignment anchors the dataset to the BIM coordinate system. This system supports modeling, coordination, and documentation. This dual-layer alignment enables accurate overlay of scanned data onto BIM elements. It allows verification of geometry, system placement, and construction tolerances.
Alignment in BIM workflows also governs interoperability and multi-disciplinary coordination through strict adherence to coordinate governance. Architectural, structural, and MEPF scan to BIM coordination all reference the same shared coordinate system. This allows point cloud data to function as a ground truth layer during modeling and validation. High-accuracy alignment supports deviation analysis. Model elements undergo comparison against point cloud geometry. This identifies positional offsets at millimeter-level tolerances.
This capability directly influences clash detection accuracy, constructability validation, and installation verification. The workflow incorporates transformation validation against control points, true north orientation, and survey benchmarks. These maintain global consistency across large-scale projects. Any deviation in alignment propagates into incorrect geometry interpretation, system misplacement, and coordination conflicts. These positions scan alignment as a governing factor in model fidelity and project accuracy.
Types of Scan Registration Methods
Scan registration methods define how transformation models align multiple point clouds. They operate under varying site and data conditions. Each method operates on a different correspondence strategy, influencing convergence behavior, error distribution, and computational load. Method selection depends on overlap percentage, control availability, geometric uniqueness, and required tolerance levels.
High-control environments favor deterministic alignment, and complex or data-heavy environments benefit from probabilistic and iterative optimization approaches. Advanced workflows combine multiple strategies with validation checkpoints to control error propagation and achieve stable convergence across large datasets.
1. Target Based Registration
Target-based registration uses surveyed control objects such as spheres or checkerboards with known spatial relationships. The algorithm identifies target centroids and computes transformation matrices through least-squares adjustment. This method produces low residual error and stable convergence. It performs particularly well in long-range or multi-level projects. Control networks guide alignment consistency throughout.
2. Feature Based Registration
Feature registration extracts geometric primitives such as planes, edges, and intersections. It matches them across datasets using descriptors and spatial constraints. This approach depends on feature uniqueness and distribution density. Environments with repetitive elements reduce matching confidence and increase the probability of incorrect correspondences during transformation estimation.
3. Cloud Registration
Cloud-to-cloud registration applies iterative optimization techniques such as ICP to minimize point-to-point or point-to-plane distances across overlapping regions. Convergence depends on initial alignment quality and overlap percentage, often above 30%. This method distributes residual error across the dataset and supports large-scale processing with high computational demand.
4. Manual Registration
Manual registration defines correspondences through user-selected points, creating transformation parameters through direct input. This method supports edge cases where automated detection produces unstable results. Accuracy depends on operator judgment and point selection quality. This approach often supports refinement or correction within broader automated workflows.
5. Hybrid Registration
Hybrid registration combines deterministic control from targets with probabilistic refinement from algorithm driven cloud registration techniques. Initial alignment uses control points or features, followed by iterative optimization to distribute residuals evenly. This method improves robustness in complex environments and supports scalable workflows with controlled accuracy and computational efficiency.
Step-by-Step Point Cloud Registration Process

The point cloud registration workflow follows a structured sequence that transforms raw scan data into an aligned and usable dataset. Each stage builds on the previous one, controlling error propagation and improving alignment stability.
Step 1: Data Validation: Data validation evaluates dataset integrity before registration by assessing spatial continuity, scan overlap distribution, and acquisition consistency. This stage defines readiness for alignment and prevents instability during transformation estimation.
- Analyze overlap percentage between adjacent scans (minimum 30–40%)
- Check scan station distribution and coverage uniformity
- Validate scanner calibration and acquisition parameters
- Detect misfires, scan drift, and positional inconsistencies
- Review metadata such as timestamps and scan resolution
Step 2: Noise Removal: Noise removal improves signal quality by isolating true surface geometry from environmental interference. This stage enhances correspondence detection and reduces error propagation during iterative alignment processes.
- Apply radius and statistical outlier filters
- Remove ghosting effects from moving objects
- Eliminate multi-path reflections from glass and metal
- Filter atmospheric distortions and edge noise
- Normalize intensity variations for cleaner datasets
Step 3: Segmentation and Clustering: Segmentation organizes large datasets into logical regions using geometric and spatial relationships. This structure improves laser scanning data processing efficiency and allows localized control over alignment in complex environments.
- Cluster datasets using voxel grids or octree structures
- Segment planar, linear, and irregular geometries
- Isolate structural systems such as walls, floors, and ceilings
- Reduce computational load through partitioned processing
- Enable region-wise registration strategies
Step 4: Initial Alignment (Coarse Registration): Coarse registration estimates approximate transformations between scans, creating a stable starting condition for optimization. This stage defines relative positioning through controlled references or overlap estimation.
- Use target centroids or feature correspondences for alignment
- Apply bounding box or centroid-based positioning
- Estimate rotation and translation parameters
- Validate rough alignment visually and statistically
- Prepare datasets for iterative refinement
Step 5: Fine Registration: Fine registration refines transformations through iterative optimization, minimizing spatial discrepancies across overlapping regions. This stage distributes residual errors and improves global alignment consistency.
- Apply point-to-point and point-to-plane ICP variants
- Optimize transformation matrices iteratively
- Monitor convergence thresholds and iteration limits
- Reduce residual error across dense datasets
- Balance local and global alignment constraints
Step 6: Accuracy Verification: Accuracy verification quantifies alignment quality through statistical evaluation and control comparison. This stage confirms compliance with project tolerances and validates spatial consistency across the dataset.
- Measure RMSE and standard deviation across control points
- Compare results with survey benchmarks and ground truth
- Perform cross-sectional deviation analysis
- Validate alignment against LOA or project specifications
- Identify localized distortion or drift zones
Step 7: Export and Integration: Export and integration prepare registered datasets for BIM environments by preserving coordinate fidelity and data structure. This stage enables seamless transition into the scan to BIM workflow for modeling and coordination.
- Convert datasets into RCP, RCS, or E57 formats
- Maintain shared coordinate systems during export
- Index and compress data for efficient loading
- Align datasets with BIM project base points
- Enable interoperability across modeling platforms
Software such as Autodesk ReCap Pro supports visualization, filtering, and registration management throughout this workflow. Large scale datasets exceeding 10GB require indexing, decimation, and memory optimization strategies to maintain efficiency and alignment stability.
Common Errors in Scan Registration and Alignment
Scan registration errors originate from data quality issues, algorithm limitations, and workflow inconsistencies. These errors directly influence BIM accuracy, coordination reliability, and project outcomes. Early identification and correction of these issues improve alignment stability and reduce downstream modeling conflicts.
| Error Type | Cause | Impact |
|---|---|---|
| Misalignment | Incorrect scan positioning | Shifted or duplicated geometry |
| Noise | Moving objects, reflections | Poor point matching |
| Coordinate Mismatch | Different reference systems | Global alignment shift |
| ICP Convergence | Weak initial alignment | Wrong transformation solution |
| Feature Ambiguity | Repetitive geometry | Incorrect correspondences |
| Occlusion | Blocked scan areas | Missing data regions |
| Data Overload | Large unoptimized datasets | Slow processing, lag |
| Human Error | Wrong point selection/setup | Alignment inaccuracies |
Best Practices for Accurate Point Cloud Alignment

The laser scan to BIM process demands controlled transformation stability, correspondence quality, and error distribution across the dataset. High-performing workflows focus on overlap management, coordinate governance, and iterative validation. These factors maintain convergence stability and minimize residual error propagation throughout BIM integration.
1. Control Overlap Geometry: Maintain structured scan overlap between 30–60% with angular diversity across scan stations. Balanced overlap improves correspondence density, stabilizes ICP convergence, and reduces local distortion in complex geometries.
2. Coordinate Governance Strategy: Define survey control, base point, and shared coordinate hierarchy before processing. A governed coordinate framework prevents cumulative transformation drift and maintains global consistency across multi discipline BIM environments.
3. Hybrid Constraint Application: Apply target constraints for initial transformation and follow with cloud-registration optimization. This combination anchors global alignment and distributes residual errors through iterative refinement across overlapping regions.
4. Controlled ICP Initialization: Start ICP with bounded search parameters and pre-aligned datasets. Strong initialization reduces local minima risks and improves convergence toward the global optimal solution during fine registration.
5. Error Distribution Management: Balance residual error across the network of scans rather than concentrating it locally. Even error distribution improves global alignment stability and reduces geometric distortion in downstream modeling.
6. Density Normalization: Standardize point density across datasets using voxelization or decimation. Uniform density improves correspondence matching and prevents bias in transformation estimation during iterative alignment.
7. Hierarchical Registration Approach: Register datasets in clusters or zones before global alignment. This strategy reduces computational complexity and improves stability in large-scale or multi-level projects.
8. Control Point Validation Loop: Validate alignment continuously against independent control points and survey benchmarks. This loop detects drift early and maintains adherence to project tolerance thresholds.
9. Multi-Resolution Processing: Execute registration at coarse resolution first, followed by high-resolution refinement. Multiscale processing improves computational efficiency and enhances final alignment accuracy.
10. Continuous Error Monitoring: Track RMSE trends, residual vectors, and convergence behavior throughout the process. Ongoing monitoring identifies instability early and supports corrective adjustments before final BIM integration.
These practices create a controlled registration environment that supports predictable outcomes across complex datasets. A structured approach improves transformation consistency and enhances confidence in spatial accuracy. It enables scalable workflows for large and multi-disciplinary BIM projects.
Conclusion: Ensuring Accuracy in Point Cloud to BIM
Scan registration and alignment form the foundation of successful Point Cloud to BIM workflows. They directly influence data accuracy, usability, and modeling reliability. Registration acts as the bridge between raw reality capture and BIM modeling. It transforms fragmented scan data into a structured spatial framework. This stage governs how effectively point cloud data supports modeling, coordination, and validation. It remains a mandatory component in every Scan to BIM process.
Accurate alignment improves decision-making, reduces rework, and enhances efficiency across the project lifecycle. Advanced algorithms, automation, and AI continue to improve registration speed and accuracy, supporting scalable workflows across complex environments. Successful project delivery depends on the seamless execution of capture, processing, registration, modeling, and QA stages. Organizations that adopt standardized workflows and structured validation approaches achieve consistent outcomes. They position registration as a strategic driver of cost control, schedule performance, and quality. Accurate registration also supports the development of digital twins, smart infrastructure, and next-generation AEC workflows.